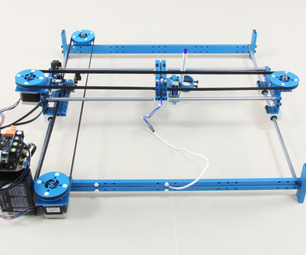
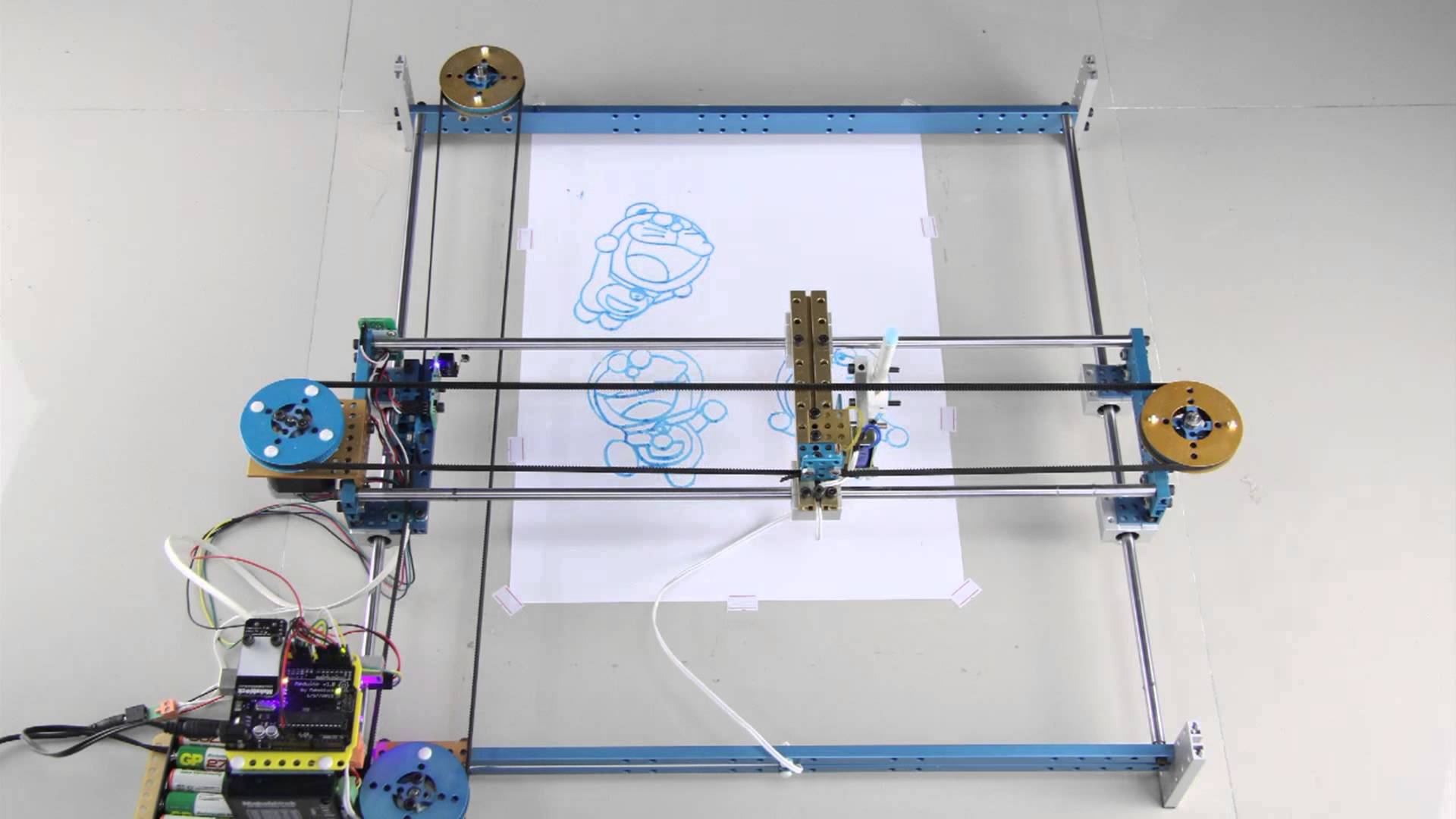
XY-Plotter
The XY Plotter can do both pen drawing and laser engraving and also has a variety of open source software for customization and control. However, it's drawing space is limited and there's no feedback or interaction during the drawing process in contrast to GhostWriter.