PCB
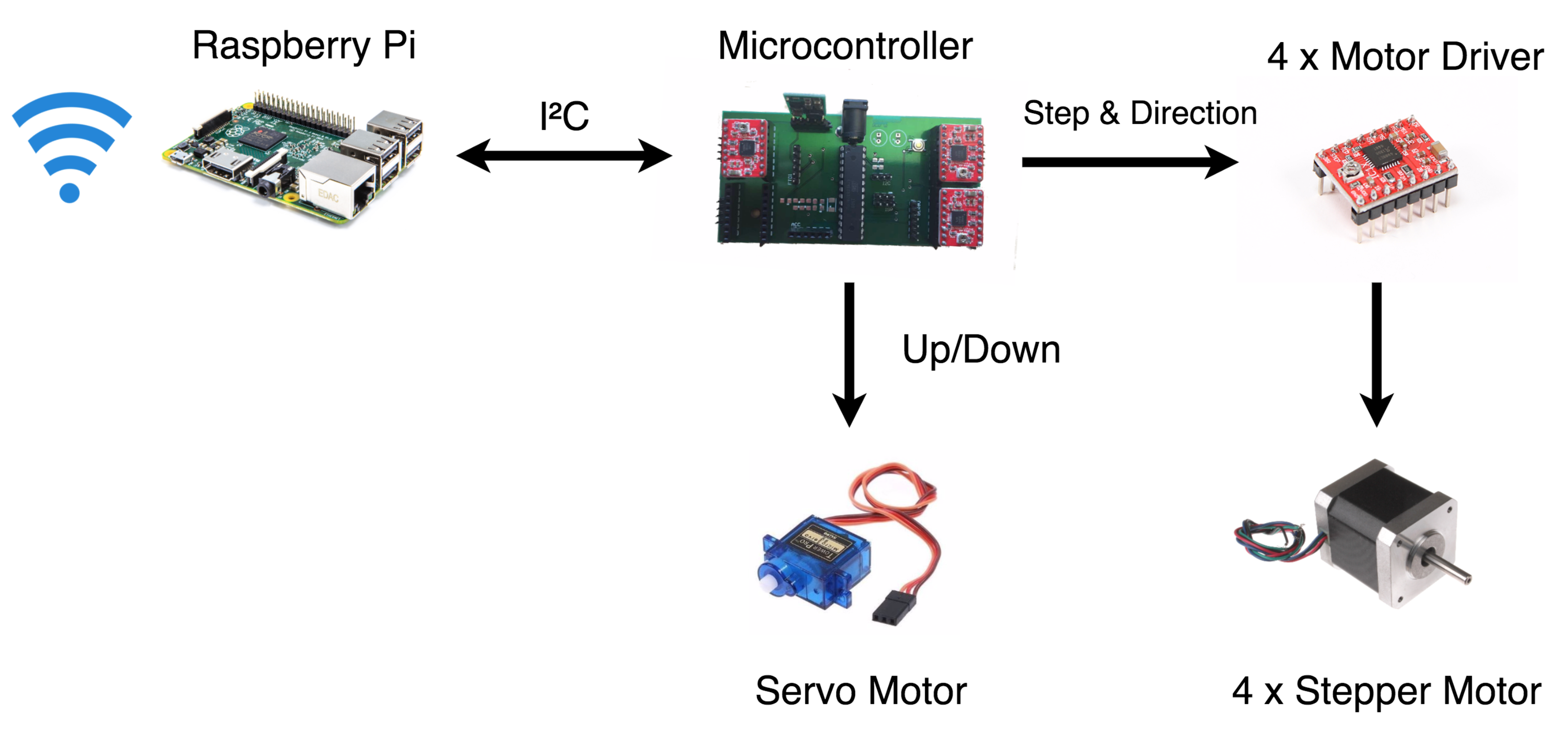
We designed our PCB to sit in the middle chasis that will be doing the drawing. Mounted on the PCB will be the 4 stepper motor controllers and those will be connected to the stepper motors via wires. The PCB will use I2C Protocol to communicate with the Raspberry pi. The PCB will be sent a number of commands for the stepper motors from the Pi and it will then send those commands to the stepper motor drivers.