|
Interface Definition File |
|
|
//Background of the project:
//Assumptions:
//1. The world is in two dimensions, and the position definition follows
// the normal coordination that (0,0) is the left-bottom corner.
//2. Each plane is assigned to an unique id when they are served by the
// the Server.
module ServerModule {
//
//This structure holds the brief position information of the plane:
// long id: the id of the plane
// float x: the x_position of the plane
// float y: the y_position of the plane
struct PlanePosition_Brief {
long id;
float x;
float y;
};
//This structure holds the position information of the plane:
// long id: the id of the plane
// float x: the x_position of the plane
// float y: the y_position of the plane
// float vx: the x_velocity of the plane (could be negative value)
// float vy: the y_velocity of the plane (could be negative value)
struct PlanePosition_Detail{
long id;
float x;
float y;
float vx;
float vy;
};
//define the type of array of PlanePosition_Brief
typedef sequence <PlanePosition_Brief> PositionInfo_Brief;
//define the type of array of PlanePosition_Detail
typedef sequence <PlanePosition_Detail> PositionInfo_Detail;
//The exception when the client passed in invalid plane id
exception invalid_plane_id{};
exception invalid_coordinate{} ;
//Category: Baseline
//Behavior: This interface supports methods to simulate the functions
// of a GroundAirTrafficControlCenter.
//Inherits from: NONE
//Clients: Planes
interface TrafficControl {
//Category: Baseline
//Behavior:
// 1. The client is supposed to call this function every 2s to
// update their position.
// 2. If this call returns exceptions, the client should retry
// to update his position to another Server
//Parameters:
// long id: the id of the plane
// float x: the x_position of the plane
// float y: the y_position of the plane
// float vx: the x_velocity of the plane (could be negative value)
// float vy: the y_velocity of the plane (could be negative value)
//Return Value:
// the name of the ground tower
//Exceptions: invalid_plane_id, invalid_coordinate
//Clients: Planes
string PositionUpdate(in long id, in float x, in float y, in float vx, in float vy)
raises (invalid_plane_id, invalid_coordinate);
//Category: Baseline
//Behavior:
// 1. When the client joins the system we will assign him a unique id.
// 2. Low priority call, no real time deadline
// Assumptions:
// 1. Clients only make this call once.
//Parameters:
// long id: the id of the plane
//Return Value:
// no return value
//Exceptions: None
//
//Clients: Planes
long Join();
//Category: Baseline
//Behavior:
// 1. When the plane leaves our system we should remove
// him from the our control and remove his id.
// 2. Client ignores the exception on duplicate submission.
// 3. Low priority call, no real time deadline
//Parameters:
// long id: the id of the plane
//Return Value:
// true if success
//Exceptions:
// 1. invalid_plane_id
//Clients: Planes
boolean Leave(in long id) raises (invalid_plane_id);
//Category: Baseline
//Behavior:
// 1. The client is supposed to call this function every 20s to
// inquiry about all planes which are at a distance of less
// than radius1
// 2. The value of this radius is determined by the plane. For
// different types of planes, this value can be different.
// 3. If this call returns exceptions, the client should switch
// to another Server right away.
// 4. The client should calculate if there are any planes which
// are "dangerous" (within a distance of less than radius2),it
// will start to call EmergencyInquery to get more information
// about these planes.
// 5. This call has lower priority than EmergencyInquery calls.
// 6. The Server should return in 20s, even without actual
// information. In this case, the client will switch to
// EmergencyInquery.
//Parameters:
// long id: the id of the plane
// float x: the x_position of the plane
// float y: the y_position of the plane
// long radius1:
//Return Value:
// The array with plane positions, please refer to Behavior for
// details.
//Exceptions:
// 1. invalid_plane_id
// 2. invalid_coordinate
//Clients: Planes
PositionInfo_Brief Inquiry(in long id,in float x, in float y, in long radius1)
raises (invalid_plane_id,invalid_coordinate);
//Category: Baseline
//Behavior:
// 1. When any other plane is in a "dangerous" radius2 (please
// refer to Inquiry) or this plane has just switched to another
// Server, the client is supposed to call this function every
// 10s to inquire about all planes which are at a distance of less
// than radius2
// 2. The value of radius2 is determined by the plane. For
// different types of planes, this value can be different.
// 3. If this call returns exceptions, the client should switch
// to another Server right away.
// 4. The client should calculate if there is no plane in
// radius2 based on information returned, it should call
// Inquiry from now on.
// 5. This call has higher priority than Inquiry calls.
//Parameters:
// long id: the id of the plane
// float x: the x_Position of the plane
// float y: the y_Position of the plane
// long radius2:
//Return Value:
// Return the array with plane positions and their velocity information.
//Exceptions:
// 1. invalid_plane_id
// 2. invalid_coordinate
//Clients: Planes
PositionInfo_Detail EmergencyInquiry(in long id,in float x, in float y, in long radius2)
raises (invalid_plane_id, invalid_coordinate);
};
//Category: Reliability
//Behavior:
//Inherits from: None
//Clients: Servers, both types Primary and Backup
interface Backup {
//Category: Reliability
//Behavior:
// 1. The primary Server should call this function at Backup Server
// to synchronize the planes' position information.
// 2. This is a one way operation; the primary Server will not
// retry this operation in case of failure for any reason
// because the information will become outdate after 2s.
// 3. If this call returns exceptions, the Backup Server is down.
//Parameters:
// long id: the id of the plane
// float x: the x_Position of the plane
// float y: the y_Position of the plane
// float vx: the x_velocity of the plane (could be negative value)
// float vy: the y_velocity of the plane (could be negative value)
//Return Value:
// no return value, success if no system exception was thrown.
//Exceptions:
//
//Clients: Primary Server
oneway void PositionBackup(in long id, in float x, in float y, in float vx, in float vy);
//Category: Reliability
//Behavior:
// 1. When the primary Server receive a Join() request, it will
// pass this call to Backup Server. Only after the two servers
// have performed the Join(), the plane client could continue.
// This could simplify the fail over process.
// 2. If this call returns exceptions, the Backup Server is down.
//Assumptions:
// 1. Assuming Network Reliability, this is called only once for every Join.
//Parameters:
// none
//Return Value:
// True if Success , False otherwise
//Exceptions:
//
//Clients: Primary Server
boolean JoinSync();
//Category: Reliability
//Behavior:
// 1. When the primary Server receives a Leave() request, it will
// pass this call to the Backup Server. Only after two servers have
// performed the Leave(), the plane client could continue.
// This could simplify the fail over process.
// 2. If this call returns system exceptions, it implies that the Backup Server is down.
// 3. The Server ignores invalid_plane_id exception.
//Parameters:
// long id: the id of the plane
//Return Value:
// true if success
//Exceptions: invalid_plane_id
//Clients: Primary Server
boolean LeaveSync(in long id) raises (invalid_plane_id);
//TODO: It is necessary to add some interface to support the fail over
// process. Maybe the Heartbeat protocol should be implemented.
// This issue is under technical investigation.
};
};
|
|
|
Architecture |
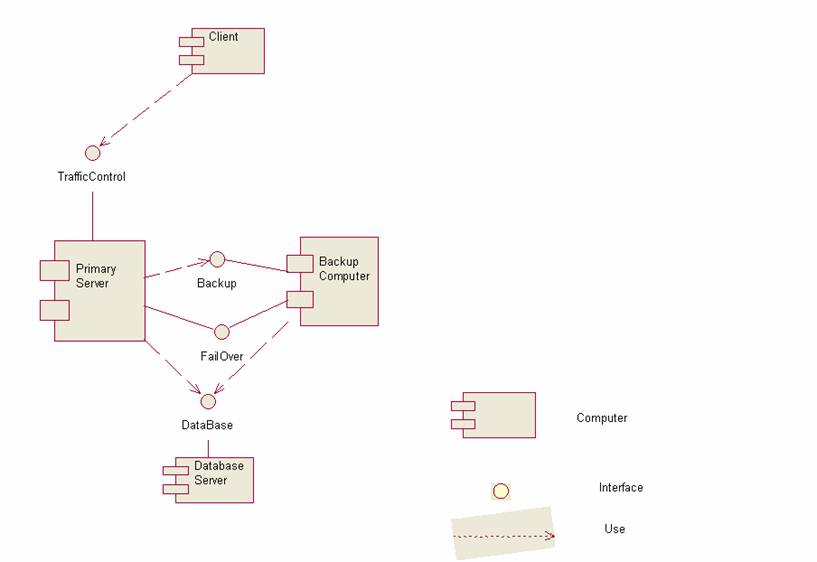
Figure1: High Level Application
NOTE:
1.
This is a
high level depiction of the architecture. We have not shown details such as the
middleware, the sub-components within each of the components, etc.
2.
The
diagram is simplified. Actually the Backup computer also implements the
TrafficControl interface, and the Primary Server also implements the Backup
interface, such that when the two servers switch the primary and backup role
with each other, the whole system could provide the same function for clients.