Because our final product is an API, our use cases can be thought of possible applications built on top of our API. Because our API is so general, there are many, many possible applications, so we will focus on one single example.
Indoor Localization Radar
We've all been there. Lost our phone somewhere in our house, but unable to find it (of course, it's placed on silent...sigh). Find my iPhone and other wifi-based localization apps will tell you your phone is in the building (great, you already knew that), but what you really want to know is where in the room it is.
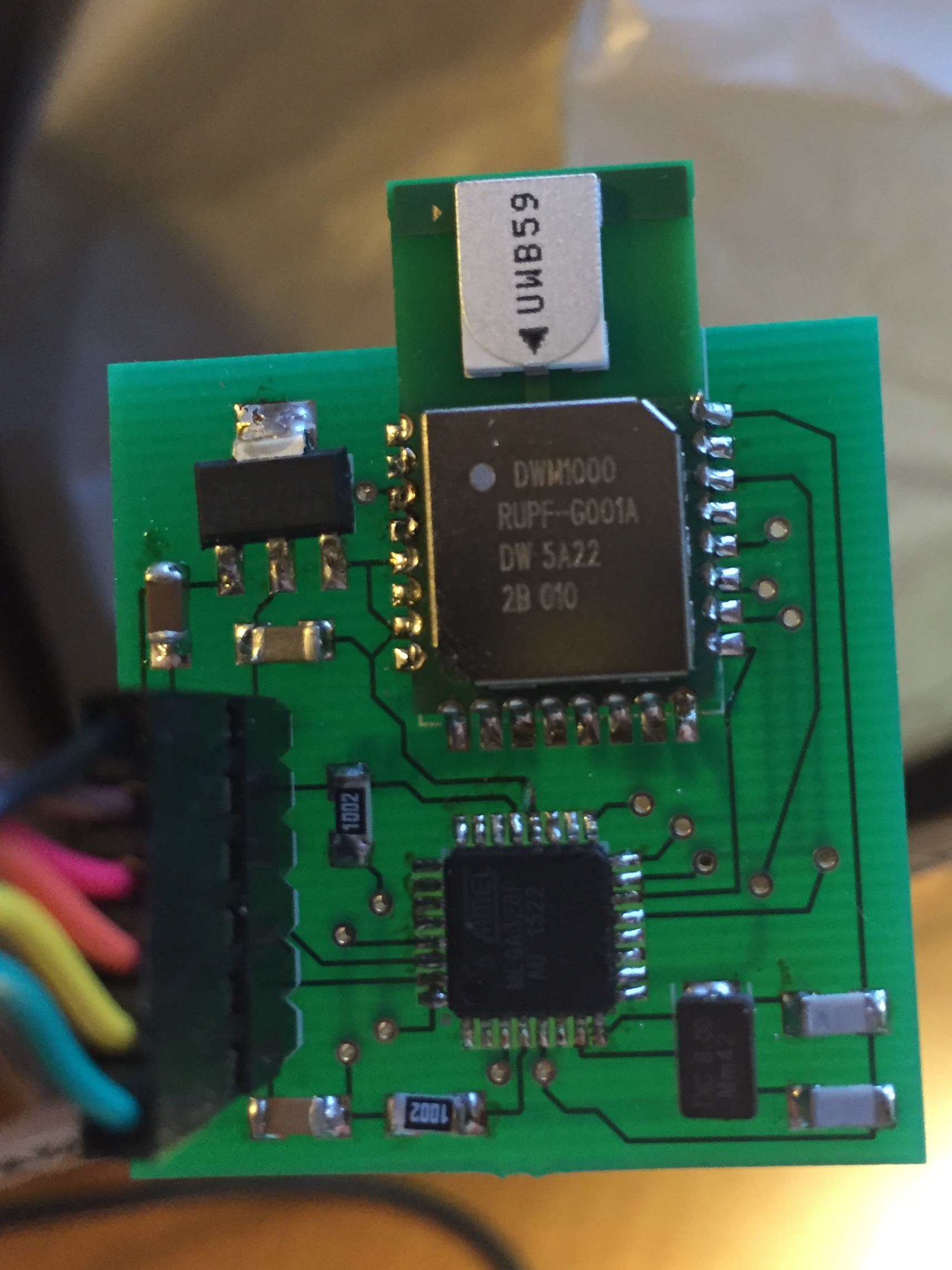
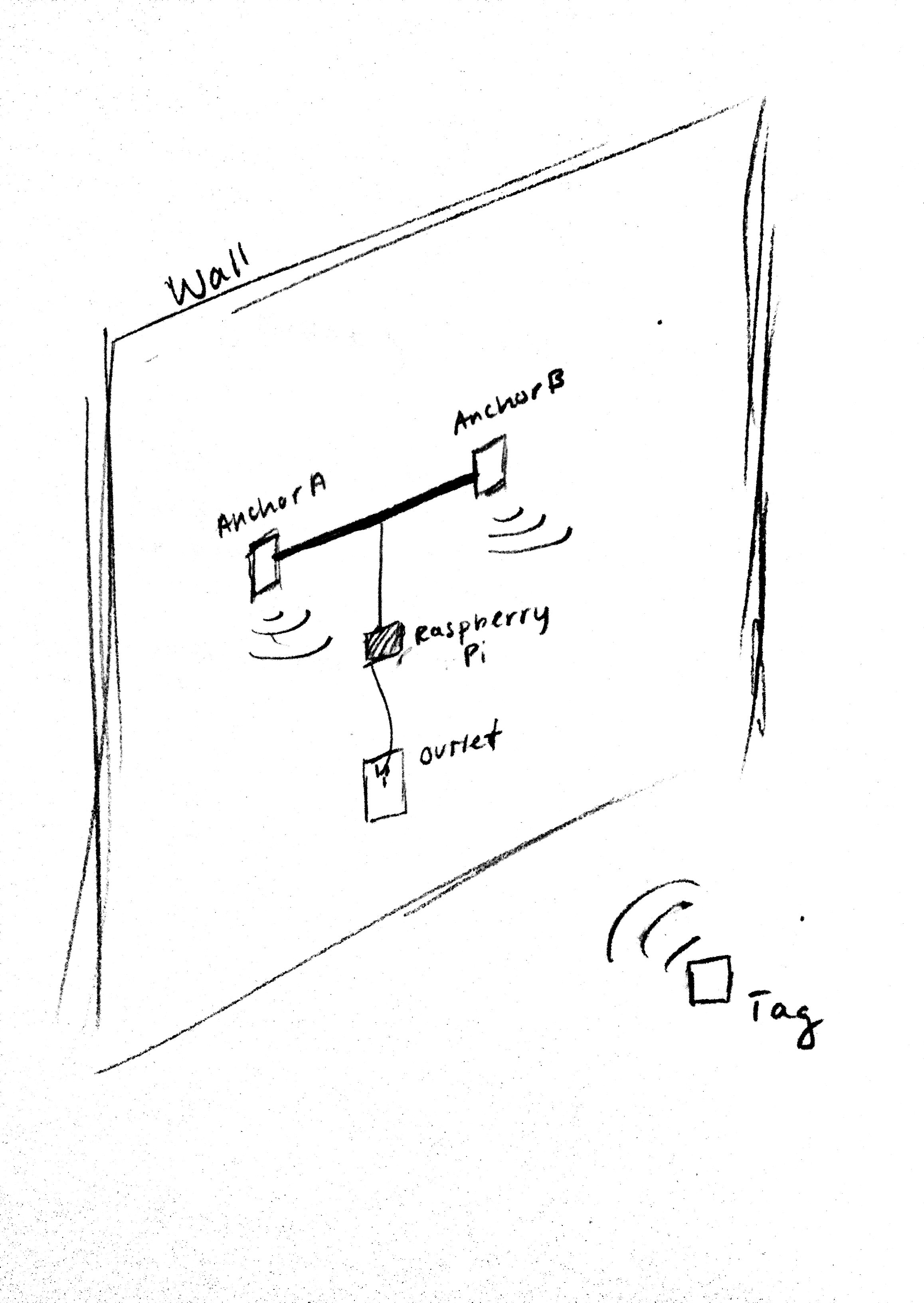
With our indoor localization radar app, all you have to do is place a small tag on your phone, and we will be able to tell you not only which room it is in, but where inside the room it is.
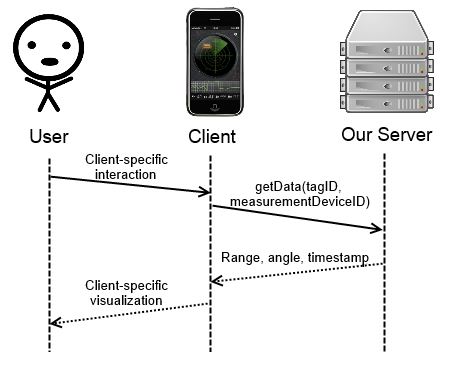
 The app idea is to make an Android mobile application which can use data it receives from the server to show the most recent position of the tag being tagged. To do this the Android app will connect to the website and pull information and update the locations of the tags on screen.
The app idea is to make an Android mobile application which can use data it receives from the server to show the most recent position of the tag being tagged. To do this the Android app will connect to the website and pull information and update the locations of the tags on screen.
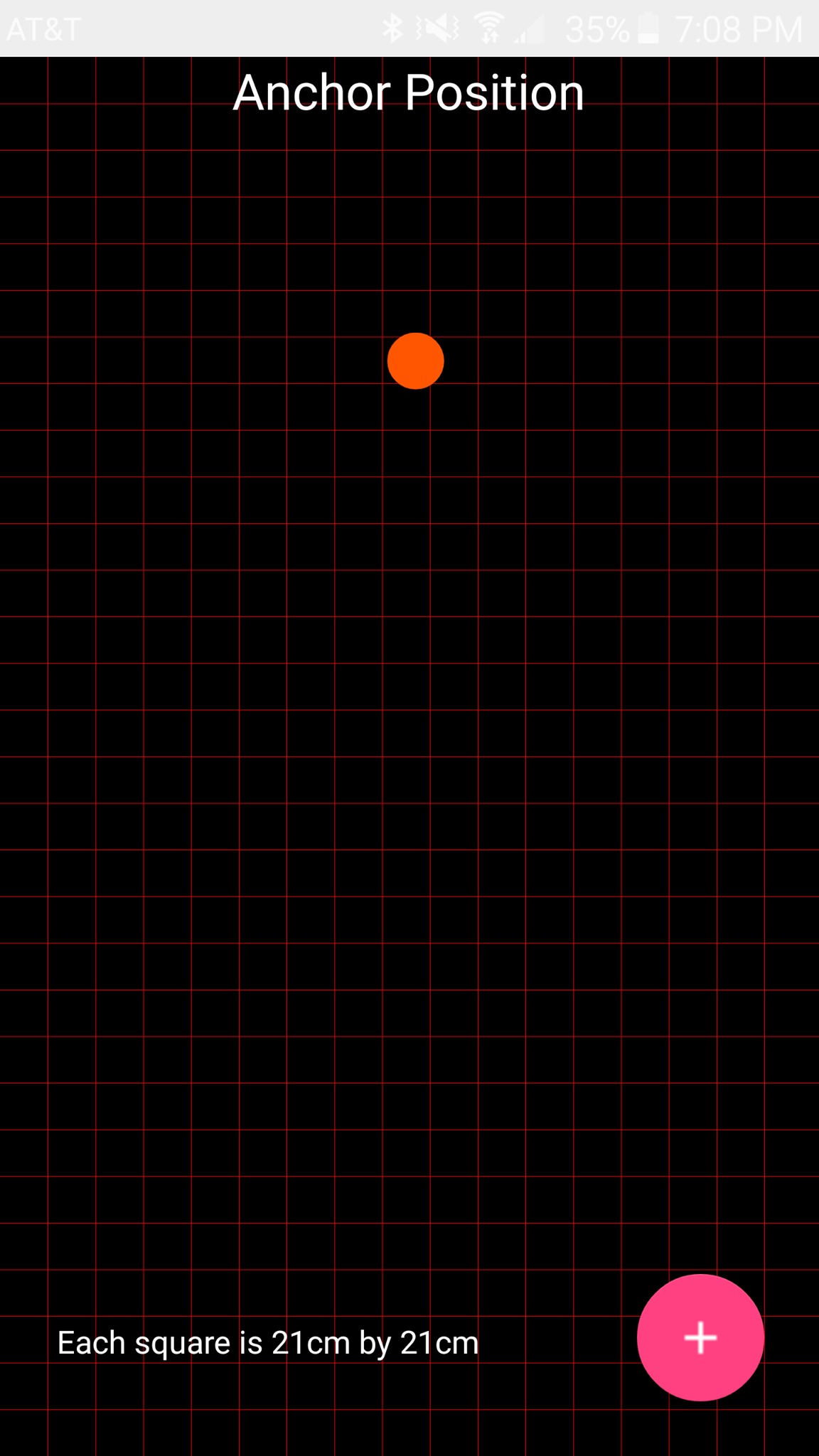
The main screen will have dots whcih move around representing different tags.
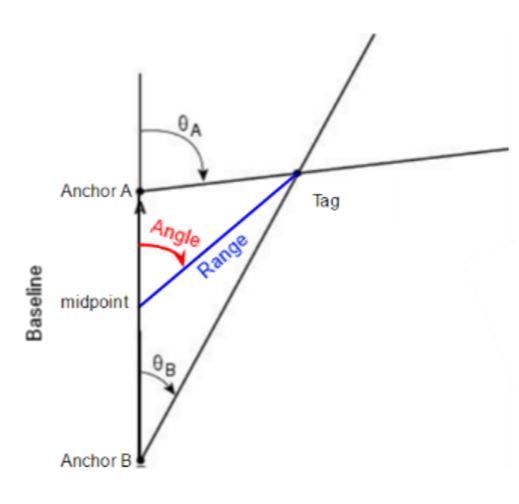
The dot representing the tag will move around as required. The position of the tag is fixed at the top of the screen and the user will have to orient himself that way as there is no way of knowing which direction the user is relative to the anchors.
 It will allow the user to add new tags by entering their tag ID and a name for them.
It will allow the user to add new tags by entering their tag ID and a name for them.
This menu comes up when the user presses the plus button to add a new tag. The user can then enter a tag ID and the application will check to make sure it exists and if it does, add it to the main screen.